Article of the Week: Performance of robotic simulated skills tasks is positively associated with clinical robotic surgical performance
Every Week the Editor-in-Chief selects an Article of the Week from the current issue of BJUI. The abstract is reproduced below and you can click on the button to read the full article, which is freely available to all readers for at least 30 days from the time of this post.
In addition to the article itself, there is an accompanying editorial written by a prominent member of the urological community. This blog is intended to provoke comment and discussion and we invite you to use the comment tools at the bottom of each post to join the conversation.
Finally, the third post under the Article of the Week heading on the homepage will consist of additional material or media. This week we feature a video from Alvin Goh, discussing his paper.
If you only have time to read one article this week, it should be this one.
Performance of robotic simulated skills tasks is positively associated with clinical robotic surgical performance
Objective
To compare user performance of four fundamental inanimate robotic skills tasks (FIRST) as well as eight da Vinci Skills Simulator (dVSS) virtual reality tasks with intra-operative performance (concurrent validity) during robot-assisted radical prostatectomy (RARP) and to show that a positive correlation exists between simulation and intra-operative performance.
Materials and Methods
A total of 21 urological surgeons with varying robotic experience were enrolled. Demographics were captured using a standardized questionnaire. User performance was assessed concurrently in simulated (FIRST exercises and dVSS tasks) and clinical environments (endopelvic dissection during RARP). Intra-operative robotic clinical performance was scored using the previously validated six-metric Global Evaluative Assessment of Robotic Skills (GEARS) tool. The relationship between simulator and clinical performance was evaluated using Spearman’s rank correlation.
Results
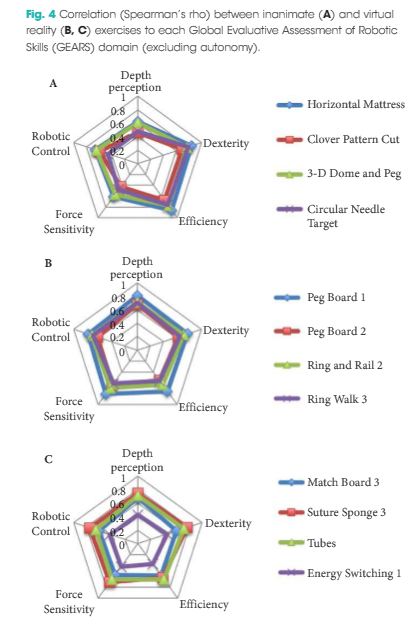
Performance was assessed in 17 trainees and four expert robotic surgeons with a median (range) number of previous robotic cases (as primary surgeon) of 0 (0–55) and 117 (58–600), respectively (P = 0.001). Collectively, the overall FIRST (ρ = 0.833, P < 0.001) and dVSS (ρ = 0.805, P < 0.001) simulation scores correlated highly with GEARS performance score. Each individual FIRST and dVSS task score also demonstrated a significant correlation with intra-operative performance, with the exception of Energy Switcher 1 exercise (P = 0.063).
Conclusions
This is the first study to show a significant relationship between simulated robotic performance and robotic clinical performance. Findings support implementation of these robotic training tools in a standardized robotic training curriculum.